Использование мышечной ткани в качестве приводов помогло исследователям создать более компактного робота, более эффективного и мягкого на ощупь.
Новый двуногий робот, созданный исследователями Токийского университета в Японии, приводится в действие мышечной тканью. Робот может не только ходить на двух ногах, но и поворачиваться, чтобы избежать препятствий.
Человеческое тело всегда вдохновляло инженеров на создание двуногих роботов. Ранее компания Interest Engineering сообщала, как исследователи создали двуногих роботов, которые могут быстро бегать и ходить по канату .
Хотя передовая электроника сделала эти достижения возможными, исследователи также работают над биогибридными роботами . Такие роботы имеют биологические компоненты, которые могут выполнять действия, подобные человеческим, с гораздо большей легкостью. Например, использование мышечной ткани внутри робота дает ему такую же способность ползать и плавать, как и люди.
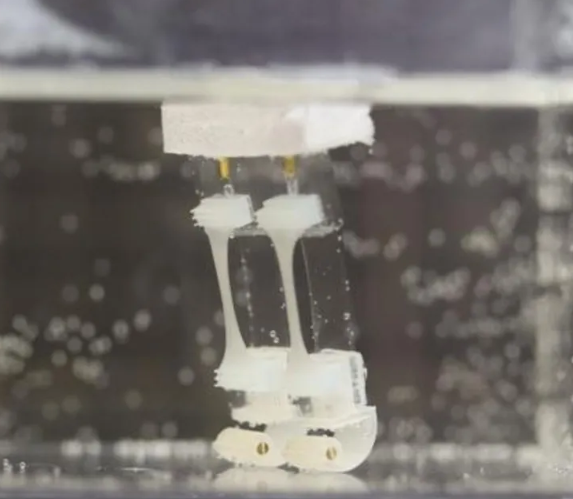
Мышечная ткань японского робота натянута вдоль гибкой конструкции каждой из пластиковых ног робота. Ноги заканчиваются поплавком, и вся конструкция помещена в сосуд с питательным раствором. Мышечные клетки хоть и искусственные, но живые требуют подвода питания.
Сокращение мышц происходит после пропускания тока через жидкость вблизи мышц от одного электрода к другому. Учёные вручную приближали электроды то к одной ноге, то к другой, заставляя их подниматься и совершать шажок вперёд. Отключение тока расслабляло мышцы, и нога совершала движение. Таким образом, были проверены режимы ходьбы по прямой и развороты на месте, когда сокращалась только одна мышца на той или иной ноге.
Учёные отметили, что предложенное ими решение работает, и робот с живыми мышцами способен перемещаться и совершать манёвры на местности. В будущем они планируют разработать устройства подвода питания к мышцам, чтобы они могли работать на воздухе, а также эффективные схемы подачи электрических сигналов для управления движением.