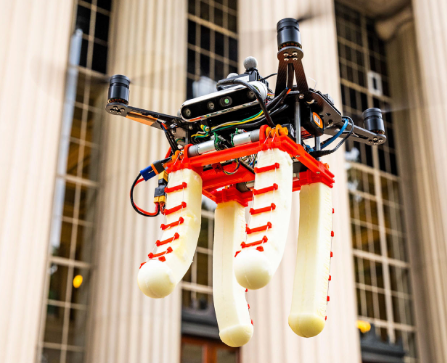
Лаборатория Spark Lab Массачусетского технологического института (MIT) представила дрон с мягким захватом.
Из их аналитической статьи:
“Мы описываем первый пример мягкого воздушного манипулятора, оснащенного полностью встроенным конвейером восприятия, способного надежно локализовать и захватывать визуально и морфологически разнообразные объекты. В предлагаемой системе используется новый пассивно-замкнутый мягкий захват с сухожильным приводом, который обеспечивает быстрое закрытие при захвате, компенсируя при этом ошибки позиционирования, соответствуя морфологии объекта и гася силы реакции. Система включает в себя встроенный конвейер восприятия, который сочетает в себе нейросетевой семантический детектор точек, современный надежный оценщик положения 3D-объекта и сглаживающее устройство с фиксированным запаздыванием для оценки положения известных объектов. Полученная оценка позиции передается планировщику траектории с минимальным захватом, отслеживаемой адаптивным контроллером, который полностью компенсирует добавленную массу измельченного объекта. Наконец, контроллер на основе конечных элементов определяет оптимальную конфигурацию захватов для захвата. Эксперименты на трех различных объектах подтверждают, что наш подход обеспечивает динамичный, высокоскоростной и универсальный захват, что является необходимым для таких задач, как быстрая доставка упаковки или оказание помощи в чрезвычайных ситуациях.
Мы демонстрируем захват различных объектов с помощью бортового зрения, как в помещении, так и на улице, на скорости до 2,0 м/с – это самый быстрый захват с помощью зрения, о котором сообщается в литературе. Наконец, мы сделали важный шаг в расширении возможностей нашей платформы за пределы неподвижных целей, продемонстрировав захват целей, движущихся со скоростью до 0,3 м/с, с относительными скоростями до 1,5 м/с”.